|
OSHUN
beta
Arbitrary Order Spherical-Harmonic 1D-3P Vlasov-Fokker-Planck-Maxwell code
|


|
|
OSHUN
beta
Arbitrary Order Spherical-Harmonic 1D-3P Vlasov-Fokker-Planck-Maxwell code
|
|
Numerical Methods - Declarations. More...

Go to the source code of this file.
Functions | |
| bool | Gauss_Seidel (Array2D< double > &A, valarray< complex< double > > &b, valarray< complex< double > > &xk) |
| Performs Gauss-Seidel method on Ax = b. More... | |
| void | TridiagonalSolve (const valarray< double > &a, const valarray< double > &b, valarray< double > &c, valarray< complex< double > > d, valarray< complex< double > > &x) |
| Set up tridiagonal solver. More... | |
| void | TridiagonalSolve (const valarray< double > &a, const valarray< double > &b, valarray< double > &c, valarray< double > d, valarray< double > &x) |
| void | TridiagonalSolve (const valarray< complex< double > > &a, const valarray< complex< double > > &b, valarray< complex< double > > &c, valarray< complex< double > > d, valarray< complex< double > > &x) |
| bool | Thomas_Tridiagonal (Array2D< double > &A, valarray< double > &d, valarray< double > &xk) |
| The tridiagonal solver for implicit collisions. More... | |
| bool | Thomas_Tridiagonal (Array2D< double > &A, valarray< complex< double > > &d, valarray< complex< double > > &xk) |
| bool | Thomas_Tridiagonal (Array2D< complex< double > > &A, valarray< complex< double > > &d, valarray< complex< double > > &xk) |
| complex< double > | Det33 (Array2D< complex< double > > &A) |
| complex< double > | Detx33 (valarray< complex< double > > &D, Array2D< complex< double > > &A) |
| complex< double > | Dety33 (valarray< complex< double > > &D, Array2D< complex< double > > &A) |
| complex< double > | Detz33 (valarray< complex< double > > &D, Array2D< complex< double > > &A) |
| valarray< float > | vfloat (const valarray< double > &vDouble) |
| vector< float > | vfloat (const vector< double > vDouble) |
| Convert data structure to float structure. More... | |
| vector< float > | vfloat (const vector< complex< double > > vDouble) |
| vector< float > | vfloat_complex (const vector< complex< double > > vDouble) |
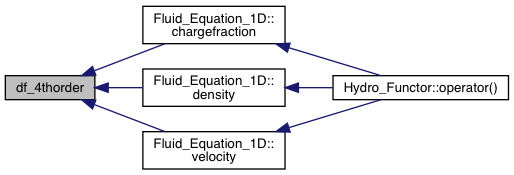
| valarray< double > | df_4thorder (const valarray< double > &f) |
| valarray< double > | df_4thorder (valarray< double > &f) |
| Array2D< complex< double > > | df1_4thorder (Array2D< complex< double > > &f) |
| Array2D< complex< double > > | df2_4thorder (Array2D< complex< double > > &f) |
Numerical Methods - Declarations.
This cpp file contains the definitions for the functions required for the numerical methods.
Definition in file nmethods.h.
| complex<double> Det33 | ( | Array2D< complex< double > > & | A | ) |
| complex<double> Detx33 | ( | valarray< complex< double > > & | D, |
| Array2D< complex< double > > & | A | ||
| ) |
| complex<double> Dety33 | ( | valarray< complex< double > > & | D, |
| Array2D< complex< double > > & | A | ||
| ) |
| complex<double> Detz33 | ( | valarray< complex< double > > & | D, |
| Array2D< complex< double > > & | A | ||
| ) |
Definition at line 469 of file nmethods.cpp.
Definition at line 489 of file nmethods.cpp.
| valarray<double> df_4thorder | ( | const valarray< double > & | f | ) |
Definition at line 421 of file nmethods.cpp.
Referenced by Fluid_Equation_1D::chargefraction(), Fluid_Equation_1D::density(), and Fluid_Equation_1D::velocity().
| valarray<double> df_4thorder | ( | valarray< double > & | f | ) |
Definition at line 437 of file nmethods.cpp.
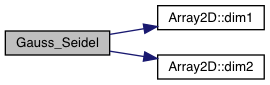
| bool Gauss_Seidel | ( | Array2D< double > & | A, |
| valarray< complex< double > > & | b, | ||
| valarray< complex< double > > & | xk | ||
| ) |
Performs Gauss-Seidel method on Ax = b.
| A | Input matrix that contains collisional integrals and coefficients |
| b | Vector representing distribution function at current time-step |
| xk | The solution vector |
Fills solution into xk. The other matrices are not modified The function returns "false" if the matrix A is not diagonally dominant
Definition at line 29 of file nmethods.cpp.
References Array2D< T >::dim1(), and Array2D< T >::dim2().
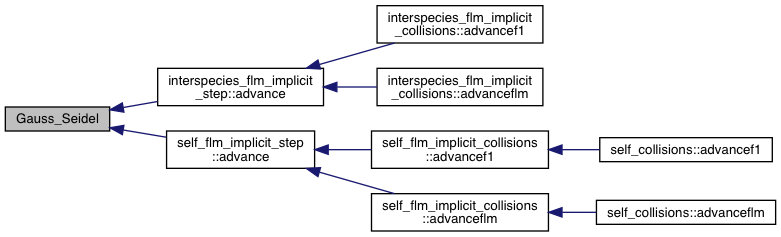
Referenced by interspecies_flm_implicit_step::advance(), and self_flm_implicit_step::advance().
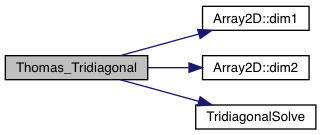
| bool Thomas_Tridiagonal | ( | Array2D< double > & | A, |
| valarray< double > & | d, | ||
| valarray< double > & | xk | ||
| ) |
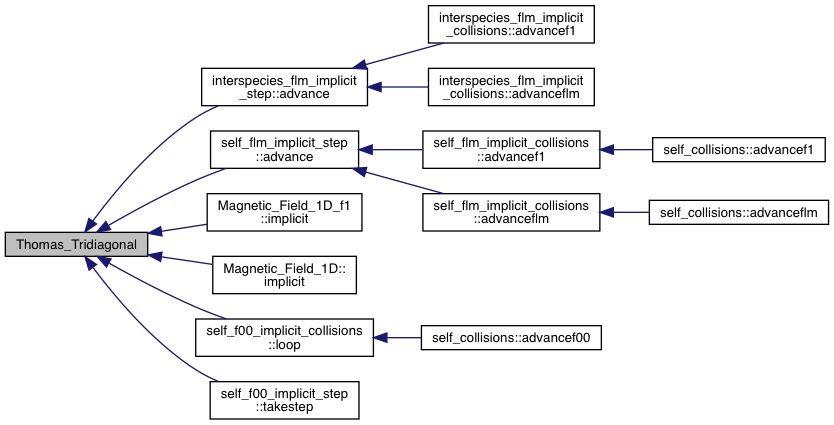
The tridiagonal solver for implicit collisions.
| A | Input matrix |
| d | Right Side |
| xk | Solution vector |
Definition at line 216 of file nmethods.cpp.
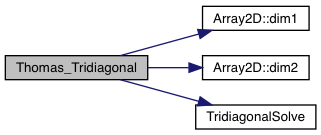
References Array2D< T >::dim1(), Array2D< T >::dim2(), and TridiagonalSolve().
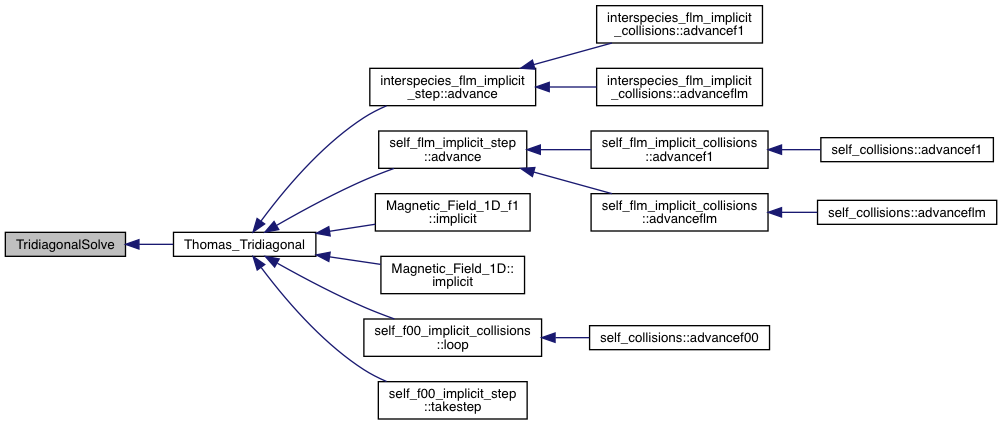
Referenced by interspecies_flm_implicit_step::advance(), self_flm_implicit_step::advance(), Magnetic_Field_1D_f1::implicit(), Magnetic_Field_1D::implicit(), self_f00_implicit_collisions::loop(), and self_f00_implicit_step::takestep().
| bool Thomas_Tridiagonal | ( | Array2D< double > & | A, |
| valarray< complex< double > > & | d, | ||
| valarray< complex< double > > & | xk | ||
| ) |
Definition at line 254 of file nmethods.cpp.
References Array2D< T >::dim1(), Array2D< T >::dim2(), and TridiagonalSolve().
| bool Thomas_Tridiagonal | ( | Array2D< complex< double > > & | A, |
| valarray< complex< double > > & | d, | ||
| valarray< complex< double > > & | xk | ||
| ) |
| void TridiagonalSolve | ( | const valarray< double > & | a, |
| const valarray< double > & | b, | ||
| valarray< double > & | c, | ||
| valarray< complex< double > > | d, | ||
| valarray< complex< double > > & | x | ||
| ) |
Set up tridiagonal solver.
| [in] | a | ??? |
| [in] | b | ??? |
| c | ??? | |
| [in] | d | right side |
| x | solution |
Definition at line 121 of file nmethods.cpp.
Referenced by Thomas_Tridiagonal().
| void TridiagonalSolve | ( | const valarray< double > & | a, |
| const valarray< double > & | b, | ||
| valarray< double > & | c, | ||
| valarray< double > | d, | ||
| valarray< double > & | x | ||
| ) |
Definition at line 151 of file nmethods.cpp.
| void TridiagonalSolve | ( | const valarray< complex< double > > & | a, |
| const valarray< complex< double > > & | b, | ||
| valarray< complex< double > > & | c, | ||
| valarray< complex< double > > | d, | ||
| valarray< complex< double > > & | x | ||
| ) |
| valarray<float> vfloat | ( | const valarray< double > & | vDouble | ) |
Definition at line 381 of file nmethods.cpp.
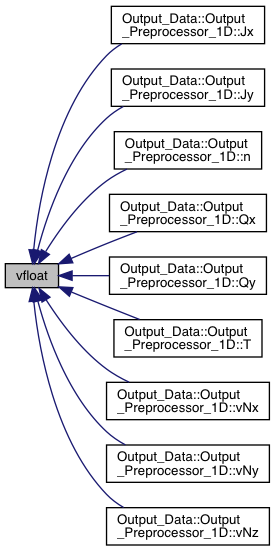
Referenced by Output_Data::Output_Preprocessor_1D::Jx(), Output_Data::Output_Preprocessor_1D::Jy(), Output_Data::Output_Preprocessor_1D::n(), Output_Data::Output_Preprocessor_1D::Qx(), Output_Data::Output_Preprocessor_1D::Qy(), Output_Data::Output_Preprocessor_1D::T(), Output_Data::Output_Preprocessor_1D::vNx(), Output_Data::Output_Preprocessor_1D::vNy(), and Output_Data::Output_Preprocessor_1D::vNz().
| vector<float> vfloat | ( | const vector< double > | vDouble | ) |
Convert data structure to float structure.
| [in] | vDouble | The v double |
Definition at line 397 of file nmethods.cpp.
| vector<float> vfloat | ( | const vector< complex< double > > | vDouble | ) |
Definition at line 404 of file nmethods.cpp.
| vector<float> vfloat_complex | ( | const vector< complex< double > > | vDouble | ) |
Definition at line 412 of file nmethods.cpp.
Referenced by Output_Data::Output_Preprocessor_1D::Jz(), Output_Data::Output_Preprocessor_1D::Qz(), and Output_Data::Output_Preprocessor_1D::vNz().
 1.8.13
1.8.13